
CAN Protocol Projects.
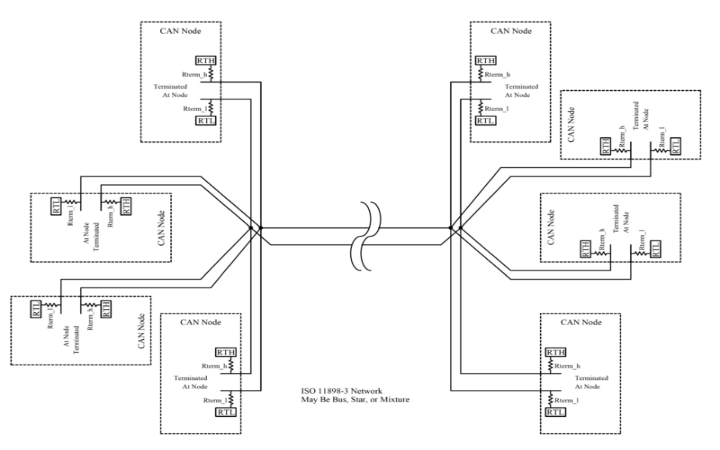
What is CAN Protocol? Controller Area Network abbreviated as CAN. Can protocol based projects are widely used in various real time applications which supports high level of security. Controller Area Network (CAN) is a serial network that was originally designed for the automotive industry, but has also become a popular bus in industrial automation applications. CAN Protocol is basically a series communication protocol. A wired serial data communication protocol is CAN protocol in different terms as acceptance and volumes over various domains. From high speed network to low cost multiplex wiring its domain application varies. Controller Area Network properties are to provide flexible configuration, send message based on prioritization. For system containing large data, error signalling mechanism and error detection are being processed while consistency is assured.
CAN Communication protocol.
- CSMA/CD (Carrier Sense Multiple Access With Collision Detection)
- Message based communication protocol
- Fast, robust communication protocol
The CAN protocol was optimized for systems that need to transmit and receive relatively small amounts of information reliably to any or all other nodes on the network. CSMA/CD protocol is used for smooth handling of collision by giving equal chance to all nodes in network. Message-based routing protocol perform multicast messaging or node-node communication. In Fast, robust can communication protocol fault nodes are removed from the communication to guarantee the bandwidth in can protocol projects.
Layers of Controller area Network.
Controller Area Network contains two layers.Data Link Layer and Physical Layer.Expert support for Can Protocol Projects
Data Link Layer: They are categorized as
- MAC Layer.
- Logical Link Layer.
Logical Link Layer: By notification overload, filtering technique and management of recovery task are carried out in logical link layer while it accept message.
MAC (Medium Access Control) Layer : Process performed in MAC Layer.
- Frame Coding.
- Data encapsulation.
- Detection of error.
- Managing medium access.
- Ensuring acknowledgement for every task.
Physical Layer: Process of decoding and encoding bit, process of synchronization and bit timing are handled in physical layer.
Error Types in Controller Area Network (CAN Projects).
Stuff Error: After 5 dominant bits is transmitted continuously. The 6th bit must be opposed to it. If the 6th bit is same then it is stuff error.
Bit Error: If transmit time of the transmit bit and received time of the received bit is not equal then this state is referred as bit error.
CRC Error: CRC values must be calculated and yet contrasted with the CRC values received. Both values must be the sane for purpose of proper frame transmission. This state is known as error frame or CRC Error.
Form Error: Error in frame formation is form error. E.g. improper frame or delimiter.
Acknowledgement Error: ACK transmitter put the recessive bit and omit dominant bit from receiver. In case of proper transmission, dominant bit is observer or it is termed as acknowledgement error.
Applications of CAN Projects.
- Vehicle network routing
- Medical applications
- Railway applications
- Aircraft with flight-state sensor
- Navigation system
- Non industrial applications like sports cameras
- Coffee machine.
- Automatic door.
- Laboratory equipment.
- Telescopes.
We assit in implementing CAN Protocol Based projects for Research Scholars. Contact us for more details.
Choose our concern if you require to implement CAN Protocol Projects.Expert Guidance will be provided for CAN based Projects.
Advantages of CAN protocol Projects.
- Priority.
- Error capabilities.
- Broadcast communication.
- Low cost.
- Light weight network.